The Agri Robo Rice-Transplanter Makes Planting Beautiful
Rice-Transplanter




With the decline in food self-sufficiency, a shrinking population of farmers, and an aging workforce, Japanese agriculture is facing a number of challenges. Kubota has worked closely with farmers to find solutions to many of these issues through research and development of agricultural machinery. Automating rice-transplanting was considered a particular challenge, but Kubota has released the Agri Robo Rice-Transplanter, the world’s first machine that can do the job automatically without an operator on board. This machine carries on the Japanese rice farming tradition of “beautiful planting” while also providing “expert full-field planting” that saves farmers both effort and labor. Seeing the development of the Agri Robo Rice-Transplanter as another step forward in smart farming, Kubota is aiming toward further improvements in its technologies.
Changing How Rice is Planted in Japan
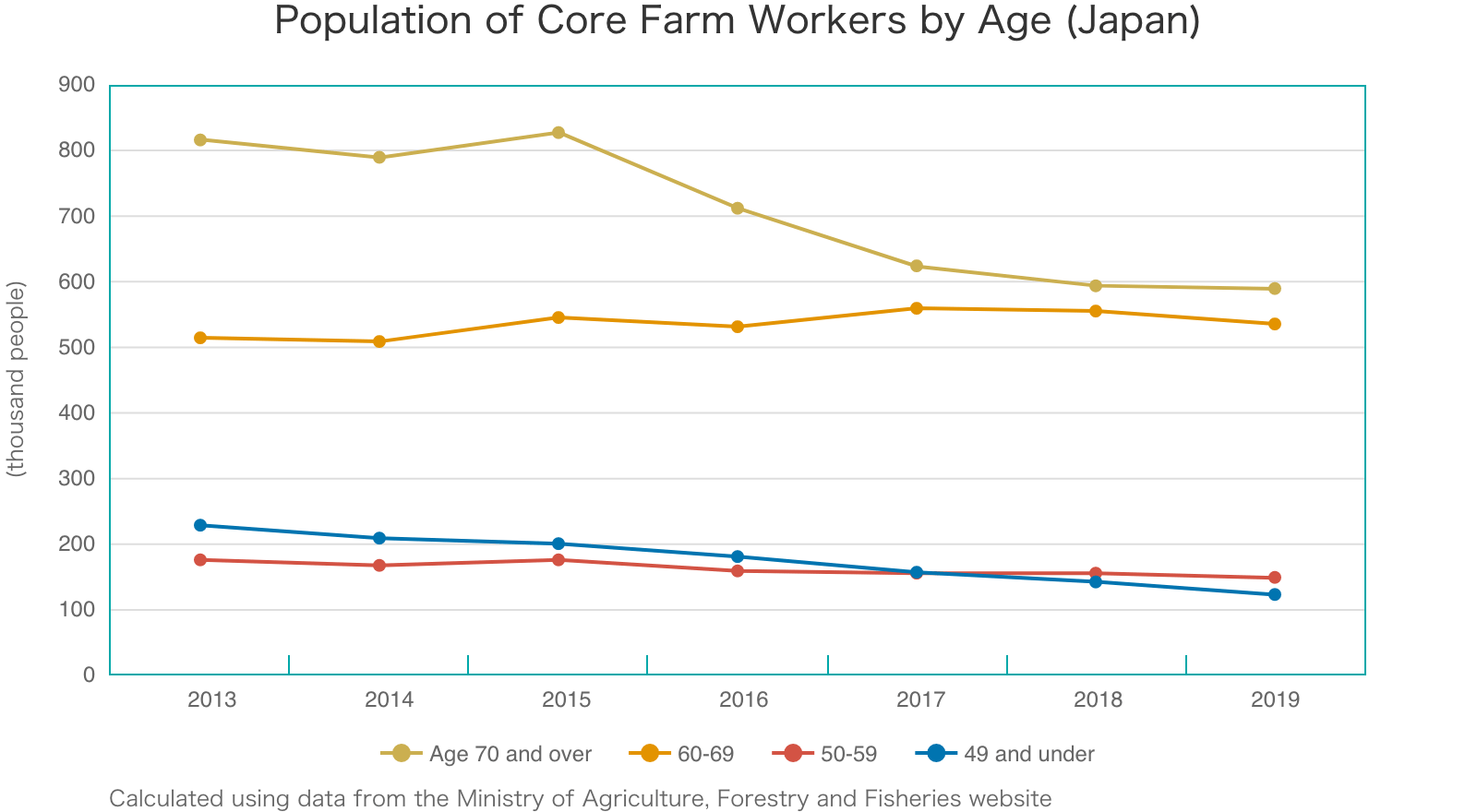
Declines in the workforce due to low birth rates and an aging population have become major social issues in Japan, and agriculture is no exception. Rice-transplanting work is particularly difficult, as it must be done in a short time to ensure uniform growth of rice plants. Seedlings must also be transported and replenished by large numbers of people, and many farms are facing labor shortages. As aging farmers leave the profession and the numbers of new workers decrease, the percentage of land tended by each professional farmer is rapidly increasing, leading to an increase in workload. There has long been a demand for automation of rice-transplanting, as it requires special skills and is quite difficult for beginners, and once planting is done, it cannot be done over. In response to these calls, Kubota began to work on development of an automatic rice-transplanter that enables anyone to plant beautifully and easily, which would contribute to savings in both effort and labor.
Seeing the Field from a Bird’s-Eye View
With rice-transplanters and beyond, Kubota has put its efforts into the development of a wide range of agricultural machinery. We have based our products on technologies handed down across generations and constantly introduced new technologies to promote the mechanization of farm work. Kubota’s growth traces the history of agriculture in Japan, and this has enabled us to overcome numerous steps and achieve the automatic operation of rice-transplanters in a short development time of about two years.
Could “beautiful planting” be achieved with automated machinery? To reduce the burden of transplanting work that farmers have always had to deal with, and to achieve beauty in planting that lives up to Japanese traditions, a team was brought together of mostly young engineers whose efforts would reshape the future. Each was assigned tasks to develop a design that could ultimately meet all of the demands, including developing the system to achieve automated operation, the steering technology for maneuvering the machine through cultivated fields, and safety assurance for operation without human drivers.

If seedlings can be planted in an evenly-spaced manner without overlapping, rice would grow uniformly and without waste. Moreover, beauty in planting is a tradition with Japanese rice farming, and the beautiful planting that experienced farmers achieve cannot simply be replicated by making a rice-transplanter operate automatically. Multiple functions must be added, including planting in a straight line, detection of obstacles, and generation of field maps and planting routes.
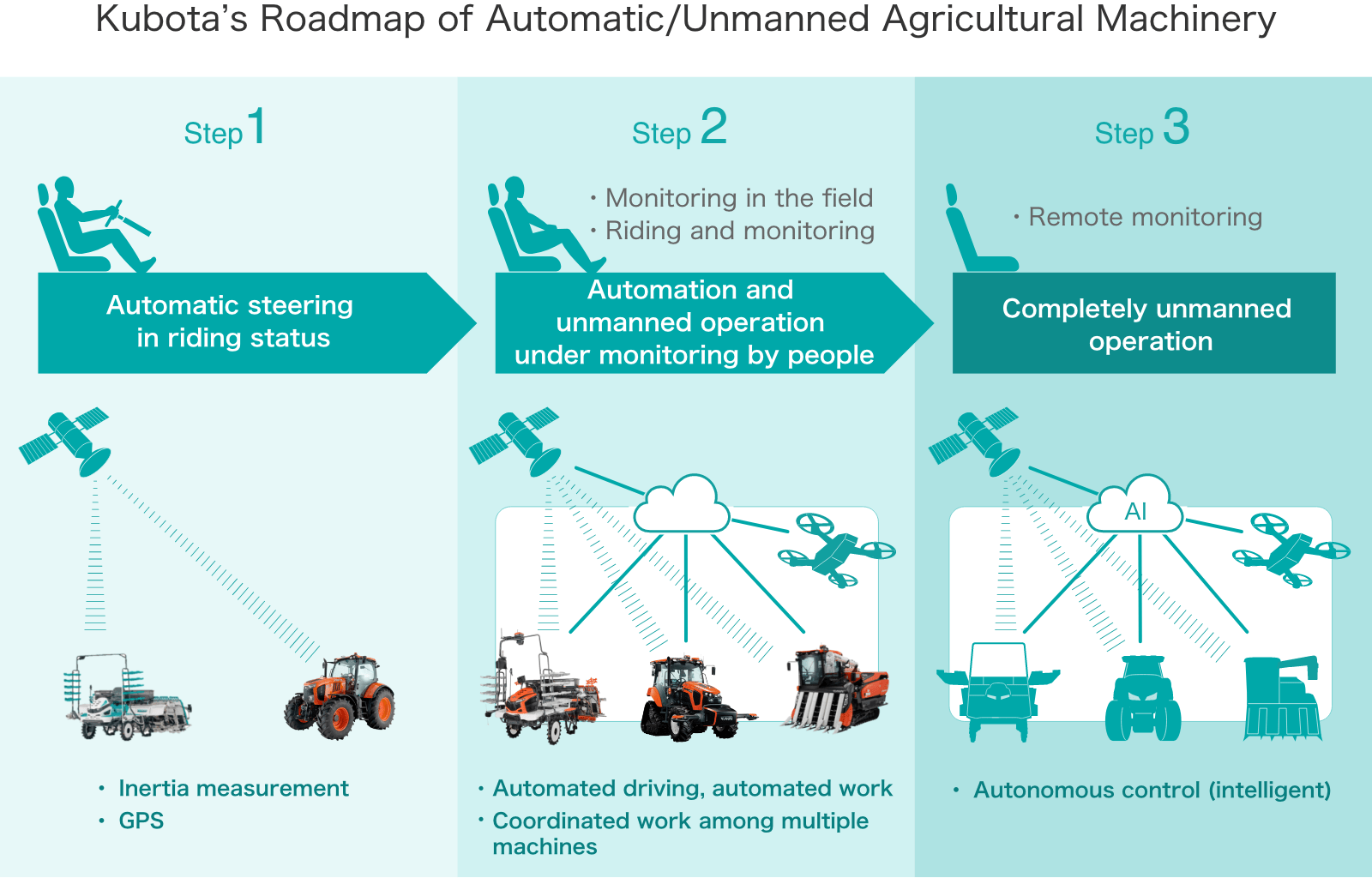
Kubota’s approach to development of agricultural machinery that operates automatically without a human driver is carried out in three steps. The development of this industry-first automatic rice-transplanter marks the completion of step 2. In this step, we identified a number of issues and took several measures to ensure safe driving even when no driver is on board, in addition to turning during automated operations. Doing so established the technologies for beautiful rice planting that can be done automatically. Kubota named this function, which plants seedlings evenly from one corner of the field to another, “expert full-field planting.” This makes it possible for anyone to easily plant seedlings beautifully, just like an experienced farmer.
The key to achieving “expert full-field planting” was to change the perspective from which the cultivated field is viewed, from laterally to above. Until now, people planting a field would look at it from the view of a human doing the work, taking in the vast field in front of them – that is, from the side – and plant in order from the opposite side of the field’s entrance. On the other hand, the Agri Robo rice-transplanter captures the entire field as a map from a bird’s-eye view. It combines the brain’s ability to design rational routes with GPS positioning data to determine an efficient sequence for planting.
When people operate rice-transplanting machines, there are two processes: round-trip planting and outer-perimeter planting. Round-trip planting is repeated in a way that leaves space for the outer-perimeter planting, and then the latter is performed to complete the task. When planting is done by hand, seedlings may be planted overlapping each other, or extra space may be left, resulting in planting that is not visually appealing. However, the Agri Robo rice-transplanter generates a route that takes a different approach from humans. In addition to the two processes above, it adds a third: inner-perimeter planting. Unlike planting by humans, this route adjusts the spacing between rows so that there is no excess space, and it even calculates taking into account the ideal seedling supply and entry/exit point locations.
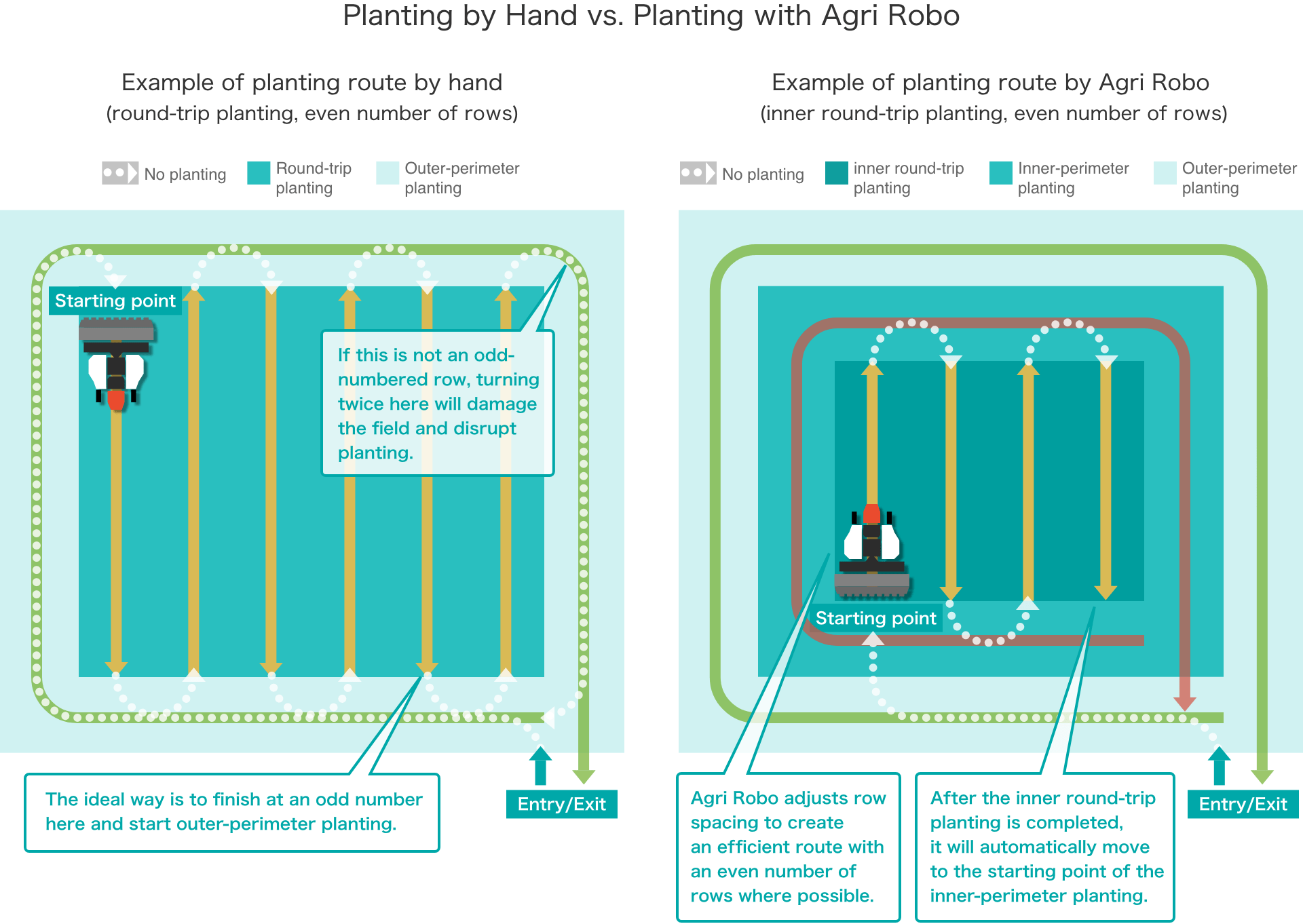
Round-trip planting by hand should ideally start diagonally across from the entry/exit point and finish at an odd-numbered row to start outer-perimeter planting. However, depending on field conditions, round-trip planting may need to be done in an even number of rows, as shown in the figure above. In this case, the machine has to turn twice as shown in the upper right part of the figure, which can damage the field and disrupt the planting process.
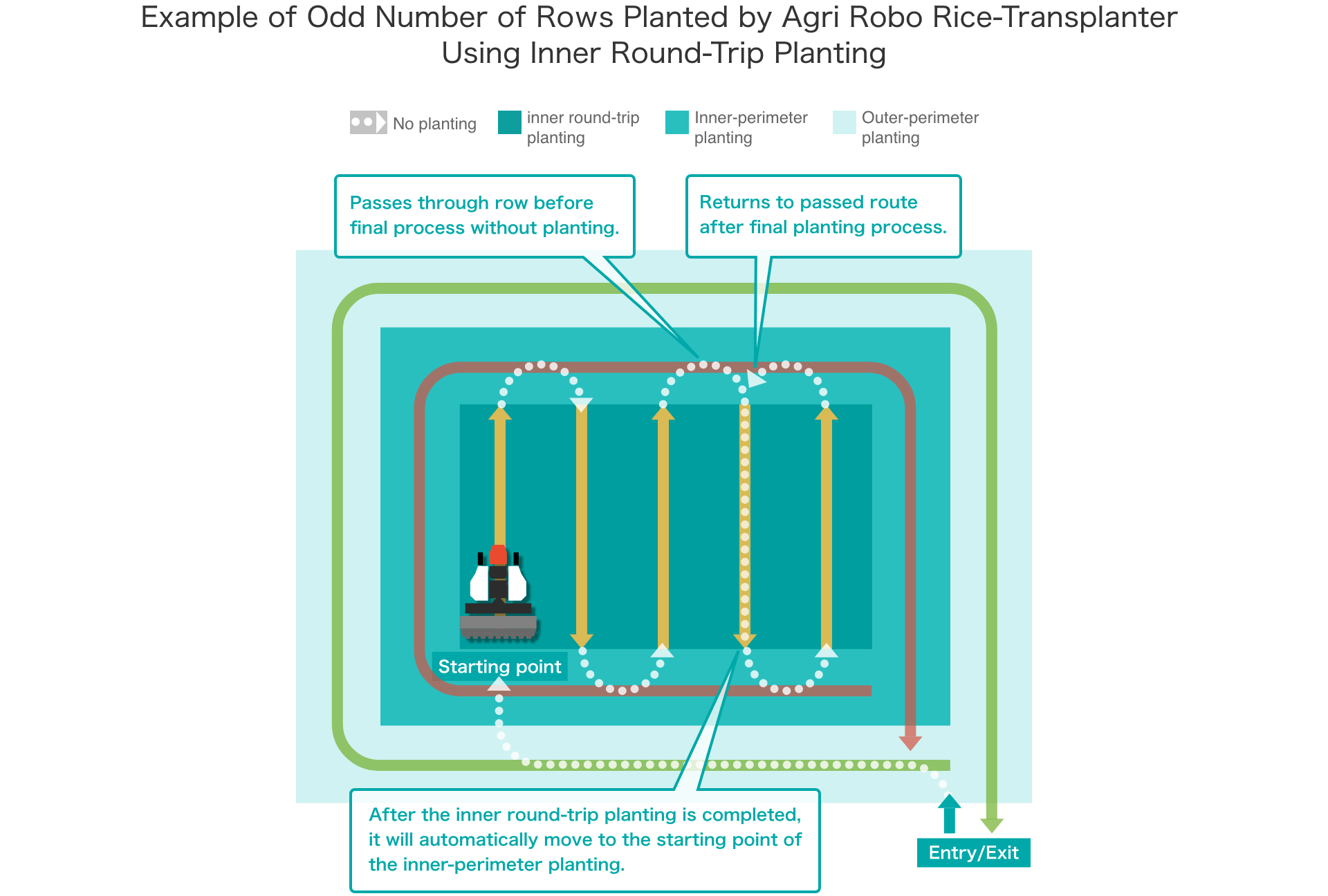
On the other hand, the Agri Robo rice-transplanter adjusts spacing between rows so that there is no unnecessary space, creating a route that enables inner round-trip planting with even rows whenever possible. This minimizes damage to the field. Depending on the condition of the field, inner round-trip planting may be done in an odd number of rows. This is solved using the “no planting process” algorithm.
When this is done using inner round-trip planting on an odd number of rows, the final process is a method by which the machine passes one row without planting anything, plants the final row, then goes back to the route it passed. This planting method is completely new and unlike any done by human hands before. By mapping the entire field with a bird’s eye view, the Agri Robo rice-transplanter was able to come up with this rational planting solution, which surprised even the engineers.
Pursuit of Astounding Beauty in Planting from Corner to Corner
Achieving this “expert full-field planting” involved numerous challenges. This is because cultivated fields are not always perfect squares, but they come in various shapes and sizes. The ridges and paddy sluices* around fields can also be irregular parts that pose obstacles to straight planting. The three main keys to resolving these issues are map generation, control, and safety.
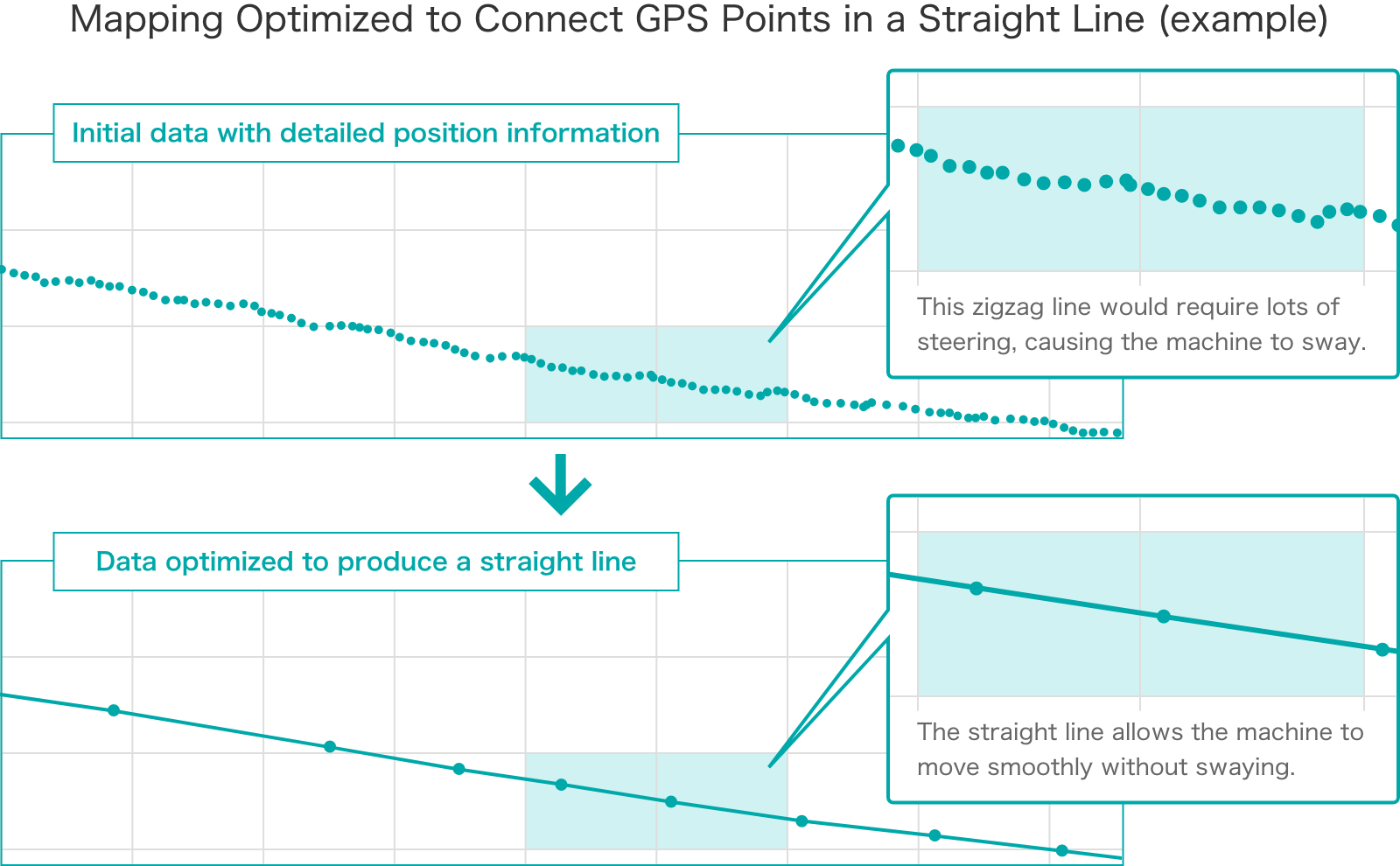
The mapping function in particular required more advanced technology to accurately capture the size and shape of the field’s perimeter. This feature extracts the necessary points from location information obtained through GPS and generates the perimeter route. Simply connecting the GPS points plotted at intervals of several tens of centimeters would create zigzag lines. If the rice-transplanter automatically steers along those lines, it would have to make large steering movements, causing it to sway left and right. This would not only make steering unsafe, but would also disrupt planting. To solve this problem, we optimally processed the positional data so that the rice-transplanter could move in a straight line, and we optimized the machine’s design so that the chassis moves smoothly without swaying, creating the foundation for beautiful planting.
- A gate that controls the flow of water in a rice paddy.
When a paddy sluice or other obstacle is in the way, the Agri Robo rice-transplanter generates a route to avoid it and plant seedlings without overlapping. Avoiding obstacles requires a large detour during outer-perimeter planting, and the machine assumes this detour route and leaves the planting area open for inner-perimeter planting, which would otherwise overlap if these steps were not taken. This prevents unnecessary overlapping of seedlings during planting work. The engineers also focused on control features of the Agri Robo, including obstacle detection and the Safety Stop that automatically stops the machine if it deviates from the automated planting area. These features incorporate Kubota’s many years of control technologies and its precise innovations in pursuit of ease of use for farmers, achieving the Agri Robo rice-transplanter’s capabilities for safe and beautiful planting.
-

To plant while avoiding obstacles, which are in this case the yellow poles that are made to look like a paddy sluice, two rows are left unplanted when planting the inner perimeter (yellow dotted line), and then planted in a smooth curve for the outer perimeter (pink dotted line).
Toward the Next Stage of Agriculture in Japan with Rice-Transplanters
Having achieved automated operation in rice-transplanters, Kubota is continuing its challenges in the next stage. Cultivated fields in Japan come in all shapes and sizes, and quite a few of them are complex. Our goal is to advance rice planting to adapt to any type of field, with planting that is both automated and beautiful. Achieving this goal requires constant trial and error. Japan is a small country with a complex topography, and its cultivated fields are created with particular ingenuity. Offering systems that support each field and each individual farmer will expand the scope of agriculture. To pave the way for the future of farming, Kubota will continue to advance its research and development while preserving the traditions of Japanese agriculture.


